各个方面。如今,发达国家的军队已经配备了相应的相对成熟的完善的武器定位系统。美国“守望者”定位系统可以精确定位狙击手和迫击炮,并为地面部队提供发射武器的准确位置。美国的PALS和瑞典的SORAS 6主要用于炮兵侦察。英国HALO Mark2火炮定位系统可以响应各种环境和地形的冲突声,准确定位敌方火炮位置。英国的希洛音响系统监测战场上炸弹点的位置以及迫击炮和火炮的位置 xxxi 。在反狙击探测方面,美国BBN系统技术有限公司研发了固定式声波探测系统。该系统可以检测步枪发出的微小音爆,然后将音爆信息传输到中央控制站,以确定子弹的轨迹、速度和高度。和距离等信息,并通过子弹xxxii的飞行轨迹确定狙击手的射击位置。以色列的反狙击声探测系统可以分组部署,以监测大面积区域。美国车载反狙击声学定位系统是成功应用于伊拉克战场的系统之一。它安装在装甲车上。伊拉克狙击手开火后,被侦测到并引发反击。我国对SADS反狙击探测系统的研究起步较晚,但发展迅速。许多高校、科研机构和企业已经开始致力于这项研究,并取得了一定的成果。枪支声学定位系统已纳入国家军标。弹头着陆系统和开胸环靶系统也已通过鉴定,列入国军标xxxiii。
对于基于声学的被动反狙击系统,研究和应用已经逐渐开始,但整体应用深度和水平还比较低。目前,声学定位技术的基本方法主要包括三类基于声音时差的定位技术xxxiv。第一种方法是通过求解接收设备信号之间的相关矩阵来计算声源位置,从而确定方向角。该方法适用于窄带信号,但不适用于人声等宽带信号的处理,计算量大。第二种方法对接收到的语音信号进行滤波、加权和求和,然后直接控制接收设备指向使波束输出功率最大化的方向。该方法可以实现多个声源的定位,但需要声源和背景噪声的先验知识,对初始值非常敏感。一般来说,这两种方法效率低,计算量大。 xxxv 第三种方法通过声音到达不同接收设备的时间延迟,得到声音到达不同接收设备的距离差,然后利用几何配置关系确定声源位置。与前两种方法相比,这种方法是一种间接定位方法。非无线传感器网络声学目标监测与定位关键技术的研究易于实现,计算量相对较小,因此该方法常用于声学定位。基于声音时间差的定位算法主要分为两部分。第一部分是时延估计,测量的是同一声源与不同接收设备之间的时间差。第二部分结合时间延迟和接收设备的几何关系来确定声源的位置。理论上,通过对由三个接收设备组成的阵列接收到的声音信号进行处理,可以根据目标与接收设备的几何关系计算出目标声源的位置。
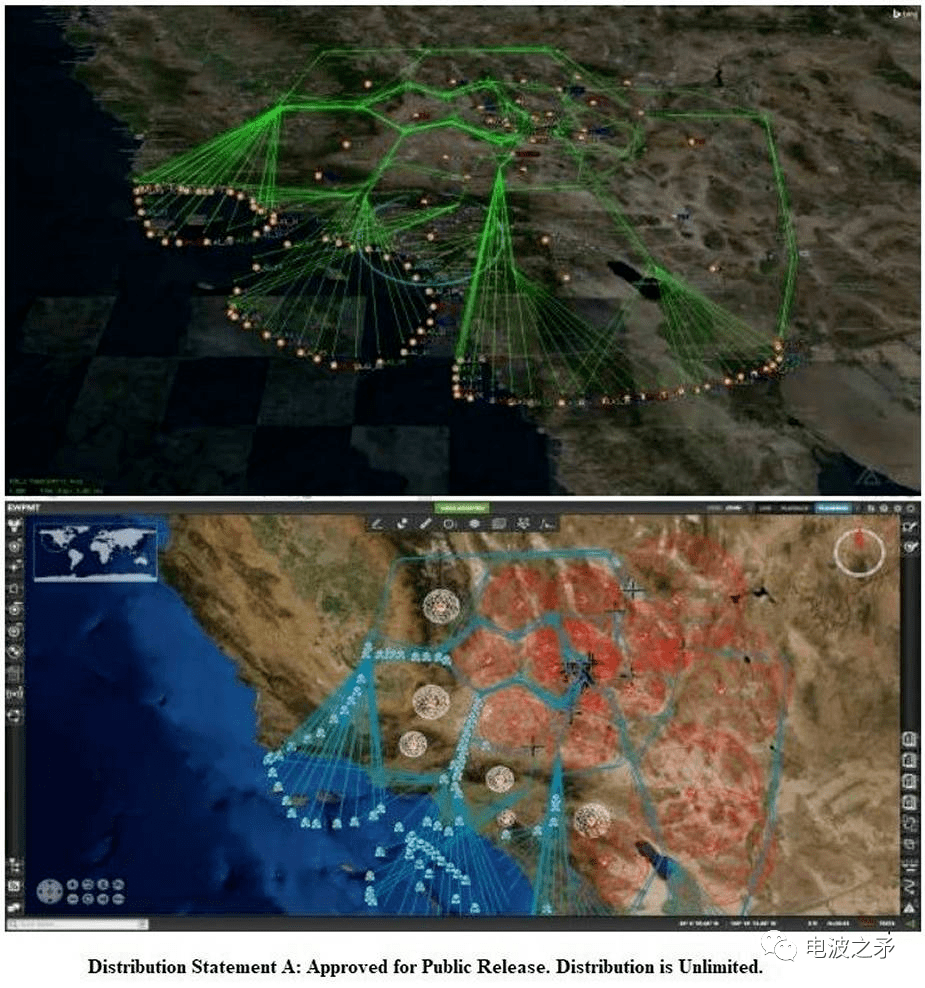
无线传感器网络与声学定位相结合的研究现状 无线传感器网络与声学定位技术相结合非常适合在恶劣环境下使用,包括敌情侦察、反恐、战场信息监测等。之前有人提出将两者结合起来。文献 xxxiii 通过无线传感器网络节点接收阵列实现声源定位 文献 xxxv 结合声源定位和无线数据传输,通过声传感器阵列无线定位同一声源信号 将声源定位数据传输到监控中心 专利 xxxvi 测量目标发出的声音信号通过多个无线声音传感器,根据测得的声音信号强度选择几个合适的传感器参与定位,接收声源定位的信号能量方法文献xxxvii指出,基于无线传感器网络声源定位技术是通过在传感器节点上添加麦克风,通过一定的信号处理方法对采集到的声音信号进行处理中国反狙击手探测系统,最终得到声源的位置坐标。该技术可以定位进入侦察网络的敌方车辆,并向指挥控制系统提供位置信息。然而,这些研究仅实现了对非合作目标、敌方声源的定位,并没有实现合作目标。友方人员的定位和友方人员对声源的相对定位不能满足友方人员在实际环境中对目标声源信息的应用需求。在战争中,狙击手很容易对战斗人员和车辆构成巨大威胁。当狙击手对战车和人员开火时,可以在覆盖目标的射程范围内部署声学传感器,接收狙击步枪的声学信号。声学定位方法用于确定狙击手的位置,也可以通过无线传感器网络实时定位士兵携带的移动节点的位置。求解相对于士兵位置的声源目标,并将信息发送回整个无线传感器网络。士兵可以实时感知他所在的位置。声源的位置和相对于自身位置的位置,可以达到准确反击敌人和保护自己的目的,从而大大提高战斗力。
基于以上的应用背景,需要对系统进行进一步的研究和改进。本文提出了一种利用无线传感器网络定位实现协同目标定位和声学定位技术实现非协同目标敌方定位的方案。最后,通过无线传感器网络,将敌方相对于己方的位置信息传递给己方人员,从而准确打击敌方声源。目的。本文的内容是根据现有的相关技术对系统的关键技术进行重新设计和实现。通过无线传感器网络节点定位和声学定位相结合,实现目标的相对位置检测。论文研究内容 论文分析并提出了无线传感器网络与声学定位技术相结合的新方案。通过无线传感器网络和声学定位算法的相关研究,完成了战场感知原理样机的设计和测试。实现了无线传感器网络。检测声源目标的相对位置。论文结构如图13所示。各章主要内容如下: 南京航空航天大学硕士论文第一章绪论。阐述了本课题的研究背景和意义中国反狙击手探测系统,分析了无线传感器网络和声学定位应用的发展和研究现状,组织了论文的内容。第二章是基于测距的无线传感器网络定位算法的研究。首先对定位算法进行了简单的总结和分类,研究了基于测距和无测距的定位算法。然后,对基于测距的五种测距技术进行了对比分析,重点介绍了基于TOF和RSSI的两种测距技术。对该技术进行了深入研究,最后通过实际测试比较了这两种测距技术在不同距离范围内的测距效果。
第三章基于滤波的无线传感器网络定位算法研究与分析。首先研究了当前的线性和非线性卡尔曼滤波,然后根据无线传感器网络中静态节点和移动节点的定位特点建立了相应的模型。相比。第四章是基于声学的定位算法的研究与分析。首先分析了分布式声学定位方案,然后研究了该方案的定位算法。最后对该算法进行了仿真研究。第五章是战场感知原理的样机设计与实现。首先,根据具体的应用背景和所研究的定位算法,构建了战场感知原理原型的设计方案。然后进行传感器节点的硬件和软件设计。最后对系统进行实际测试。第六章总结与展望。对本文所做工作的主要内容进行了总结和总结,指出了进一步研究的方向和需要解决和改进的问题。基于声学的定位算法研究与分析第4章第3章第2章基于测距的WSN定位算法研究感知原理原型设计与实现第1章引言第6章总结与展望前一章简要介绍了无线传感器网络定位的分类算法,研究了基于测距和不测距的定位算法,研究了基于测距的算法所依赖的测距技术。通过对比分析,选择了TOF和RSSI。对测距技术进行深入研究,比较这两种测距技术在不同范围内的测距效果,为后续基于最小二乘法的无线传感器网络节点定位测距融合研究奠定基础。过滤算法。
方程部分无线传感器网络定位是一种利用一定方法获取节点位置信息的技术xxxviii。根据不同的分类标准,可以分为不同的算法。根据位置信息是否需要sink节点处理,可以分为分布式计算和集中式计算。定位计算按照节点定位的顺序分为增量定位算法和并发定位算法。前者从信标节点附近的节点开始,后者为所有节点同时定位。前者是在定位过程中选择信标节点作为参考节点,后者是在定位过程中使用自己作为参考节点,每个节点不需要根据是否需要使用信标节点测量节点之间的关系。距离或角度定位分为基于测距和非测距定位算法。前者是根据节点间的距离或角度信息,然后用最小二乘法和三角法对后者进行定位。后者基于网络连接等信息。本章主要根据是否需要测量节点间的距离或角度对定位进行分类,将算法分为基于测距的定位算法和不基于测距的定位算法,并对算法进行对比分析。基于测距和不测距的WSN定位算法研究本节主要研究基于测距和不测距的定位算法中的一些典型方法,分析基于测距的最小二乘法和三角剖分,分析不测距的方法的质心算法距离、APIT、DV Hop和Amorphous算法,比较各种方法的优缺点。

基于测距的定位算法 基于测距的定位算法采用的方法是选择一种测距技术,测量未知节点到三个或更多信标节点的距离或角度。收集未知节点和信标节点的距离或相对角度信息后,使用最小二乘法或南京航空航天大学。如果只收集三个信标节点的信息,只需要三边测量法计算未知节点的位置。当信标节点数量大于三个时,需要采用多边测量方法。假设该区域部署的三个信标节点A、B、C的坐标分别为11 xy、22 xy和33 xy。 A、B、C与未知节点D的距离分别为1d、2d、3d。设 D be 的坐标为 xy 如图 21。 ACBd2d3d1 ACBd2d3d1 三边测量法示意图 那么可以建立以下方程 2222333 xxyydxxyydxxyyd 信标节点的坐标对应于 nnxy,它们与未知节点的距离对应于nd。设未知节点的坐标为xy,则可得到如下方程 2222 nnnxxyydxxyydxxyyd 线性排列 方程形式 AXB nnnnnnxxyyAxxyyMM 无线传感器网络声学目标监测与定位关键技术研究 10 xXy 2222221nnnnnnnnnnxxyyddBxxyydd 三角剖分法 假设三个信标节点A、B , C 部署在区域内对应的坐标分别为 11 xy, 22 xy, 33 xy。未知节点D的坐标为xy,节点D与节点A、B、C的夹角分别为ADB、ADC、BDC,如图22所示。
节点A、C、ADC 如果圆弧AC在ABCΔ以内,那么可以确定唯一的圆心是10101 Oxy,半径是1r,那么122AOCADC可以得到如下方程 223311 22cosxxyyrxxyyrxxyyrr 1O的坐标值可以求出同一个节点A、B、ADB对应圆心20202 Oxy和半径2r可以得到半径1r 节点B、C、BDC对应圆心30303 Oxy和半径3r 最后,未知节点D的坐标可以从10101 Oxy 20202 Oxy 30303 Oxy通过三边测量求解。无测距定位算法 无测距定位算法用于通过网络连通性 xxxix 等信息进行定位。下面主要研究比较四种无测距定位算法,包括centroid algorithm、APIT、DV Hop和Amorphous。质心算法假设在未知节点周围部署了n个信标节点,对应的坐标为iiyx。未知节点的坐标为 MMxy。如图 23 所示,未知节点坐标可以用以下公式描述: xl niiMxnx11 11nMiiyyn 南京航空航天大学硕士学位论文 11 11yx22yx 33yx 44yx nnyx MMyx APIT 算法 在 APIT 算法中,任意三个相邻的信标节点靠近未知节点所在的区域可以形成一个三角形。未知节点检测是否位于该三角形内,并选择不同的信标节点组合进行重复检测,直到所有组合用尽或达到要求的定位精度,覆盖未知节点的所有三角形交点的质心为未知节点。 xli DVHop算法在DV Hop算法中,首先计算信标节点和未知节点之间的最小跳数,然后计算平均值。每跳之间的距离可以通过平均跳距离和最小跳数的乘积来计算。最后,通过最小二乘法计算未知节点的坐标。 DVHop定位算法示意图如图25所示。假设信标节点2和信号目标节点1和3的距离和跳数已知。
平均每跳距离为 6080 2520 假设节点 4 得到节点 2 的平均每跳距离,则节点 4 到三个信标节点 无线传感器网络声学目标监测与定位关键技术研究 12 距离分别为 1 20最后通过最小平方法可以计算出节点4的坐标。 非晶算法非晶算法首先计算信标节点与未知节点之间的最小跳数。与DV Hop的区别在于网络中节点的通信半径作为平均每跳距离,可以通过平均跳距离乘以最小跳数来计算。最后通过最小二乘法计算节点之间的距离。未知节点的坐标由 xliii 算法计算。无测距算法对比分析。定位算法不需要测量距离和角度。与基于测距的定位算法相比,误差较大,但这种算法对硬件要求较少,适用于一些对定位精度要求不高的场合。表21总结了几种算法的优缺点。 各种算法的优缺点 算法优缺点 质心算法简单,计算量小,容易达到最低精度,只能粗粒度定位可以实现,APTI算法简单稳定,定位误差小,精度受节点密度影响较大。无需节点间测距 无需额外硬件支持 精度受节点密度影响较大 通信开销大 受环境影响较大 非晶通信开销小于DV Hop算法 定位精度和可扩展性不如DV Hop测距WSN节点位置测量测距技术研究基于测距的定位算法首先要选择合适的测距技术。测距技术的选择对实际测试成本和测距精度影响很大。
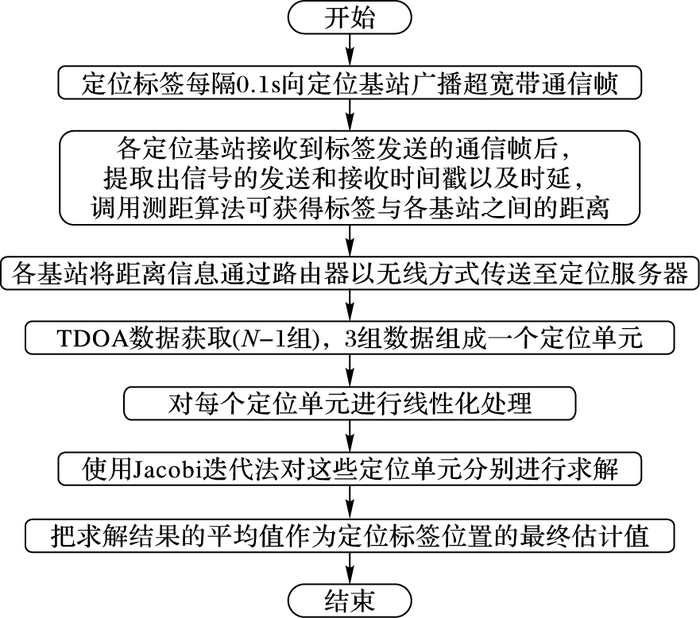
几种常见的测距技术包括 TDOA、TOA、AOA、RSSI 和 TOF。测距技术原理分析 下面主要分析这五种测距技术的具体实现方法,并对这五种技术进行对比分析。 TDOA测距技术 发送节点向接收节点发送两种传播速度不同的信号,如射频波和超声波。通过两个信号到达的时间差和传播速度,可以计算出节点之间的距离 xliv 如图26,南京航空航天大学硕士论文13发射端接收无线射频信号超声波信号1T2T TOA测距技术 TOA 测距 通过节点间信号的传输时间计算节点间距离 发送端的发送节点和扬声器同时向接收端发送射频信号和声音 信号接收端的接收节点接收到射频信号并同时开始采集声学信号。声信号的传输和采集可以认为是同步的,因为声速远小于射频信号的传播速度,因此可以通过声速和传播时间来计算节点之间的距离。 xlv 的值如图 27 所示。 无线电模块 扬声器模块 无线电模块 麦克风模块 CPUCPU AOA 测距技术 在 AOA 测距中,发送节点将信号传输到接收节点。通过测量信号的到达方向或角度信息,可以通过角度定位算法得到节点。跨距xlvi 如图28 无线传感器网络声学目标监测与定位关键技术研究14 无线电模块扬声器模块无线电模块麦克风阵列CPUCPU RSSI 测距技术根据接收到的信号强度计算通过接收节点的信号在传播过程中 节点间的损耗使用信号衰减与传播距离的关系计算 xlvii xlviii 自由空间无线电传播路径损耗模型如下 032 4410lg10lgLosskdkf 一般0d取1mk作为路径衰减因子,一般取2f因为频率单位是MHz。
在实际应用环境中,通常使用对数正态分布模型来描述由于多径、绕射、障碍物等因素造成的路径损耗。 00 10lg PLdPLkddXσ 0PLdBm 是通过参考距离后的路径损耗 0d PLd dBm 是距离 d 路径损耗 Xσ 是一个随机变量,均值为 0,标准差为 4 和 10,服从高斯分布。未知节点接收到的信号强度值可由下式得到: tRSSIPPLd tP 为信号传输强度。 IEEE802 15 4 的简化通道数学模型如图29 xlix 40 220lg 828 733lg 8ttPddRSSIPdd